Literature Database Entry
zarza2015rials
Himan Zarza, Saleh Yousefi and Abderrahim Benslimane, "RIALS: RSU/INS-aided localization system for GPS-challenged road segments," Wiley Wireless Communications and Mobile Computing, vol. 16 (10), pp. 1290–1305, June 2015.
Abstract
This paper introduces a new vehicle localization approach for global positioning system-challenged road segments (e.g., tunnels), which takes advantage of roadside units (RSUs) and in-vehicle inertial navigation system (INS). In the proposed approach, namely RSU/INS-aided localization system (RIALS), vehicles only need one RSU in their transmission range for an accurate positioning. The beacons received from the RSU along with the information provided by the INS system are used for establishing and maintaining particular locus circles. After linearization, the system of locus circle equations is solved using the linear least square estimation technique, and variations, the estimated vehicle's position is obtained. In the presence of speed and ranging, existing and INS estimation errors, the proposed RIALS adaptively sets the sufficient number of required locus circles, aiming at keeping the localization error below a given threshold. We study the effects of ranging and analytical, INS estimation errors on localization accuracy of RIALS from and simulation perspectives. Results of extensive simulations show that the localization error is more sensitive to the ranging error than the INS error. Moreover, the network traffic overhead of the proposed method is considerably lower than other competitive localization approaches. Copyright $o̧pyright$ 2015 John Wiley & Sons, Ltd.
Quick access
Original Version ![]() (at publishers web site)
(at publishers web site)
BibTeX ![]()
Contact
Himan Zarza
Saleh Yousefi
Abderrahim Benslimane
BibTeX reference
@article{zarza2015rials,
author = {Zarza, Himan and Yousefi, Saleh and Benslimane, Abderrahim},
doi = {10.1002/wcm.2604},
title = {{RIALS: RSU/INS-aided localization system for GPS-challenged road segments}},
pages = {1290--1305},
journal = {Wiley Wireless Communications and Mobile Computing},
issn = {1530-8677},
publisher = {Wiley},
month = {6},
number = {10},
volume = {16},
year = {2015},
}
Copyright notice
Links to final or draft versions of papers are presented here to ensure timely dissemination of scholarly and technical work. Copyright and all rights therein are retained by authors or by other copyright holders. All persons copying this information are expected to adhere to the terms and constraints invoked by each author's copyright. In most cases, these works may not be reposted or distributed for commercial purposes without the explicit permission of the copyright holder.
The following applies to all papers listed above that have IEEE copyrights: Personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works for resale or redistribution to servers or lists, or to reuse any copyrighted component of this work in other works must be obtained from the IEEE.
The following applies to all papers listed above that are in submission to IEEE conference/workshop proceedings or journals: This work has been submitted to the IEEE for possible publication. Copyright may be transferred without notice, after which this version may no longer be accessible.
The following applies to all papers listed above that have ACM copyrights: ACM COPYRIGHT NOTICE. Permission to make digital or hard copies of part or all of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full citation on the first page. Copyrights for components of this work owned by others than ACM must be honored. Abstracting with credit is permitted. To copy otherwise, to republish, to post on servers, or to redistribute to lists, requires prior specific permission and/or a fee. Request permissions from Publications Dept., ACM, Inc., fax +1 (212) 869-0481, or permissions@acm.org.
The following applies to all SpringerLink papers listed above that have Springer Science+Business Media copyrights: The original publication is available at www.springerlink.com.
This page was automatically generated using BibDB and bib2web.
- Incentive-based Platoon Formation: Optimizing the Personal Benefit for Drivers
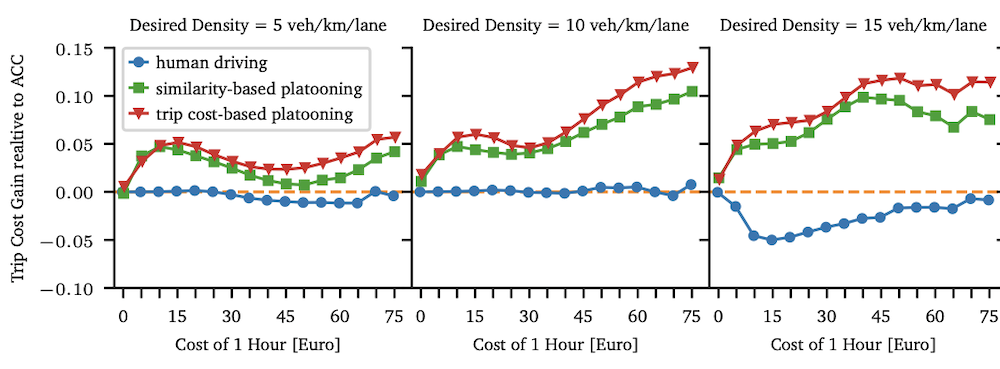
Platooning or cooperative adaptive cruise control (CACC) has been investigated for decades, but debate about its lasting impact is still ongoing. While the benefits of...
- June 16, 2025
New IEEE Transactions on Mobile Computing article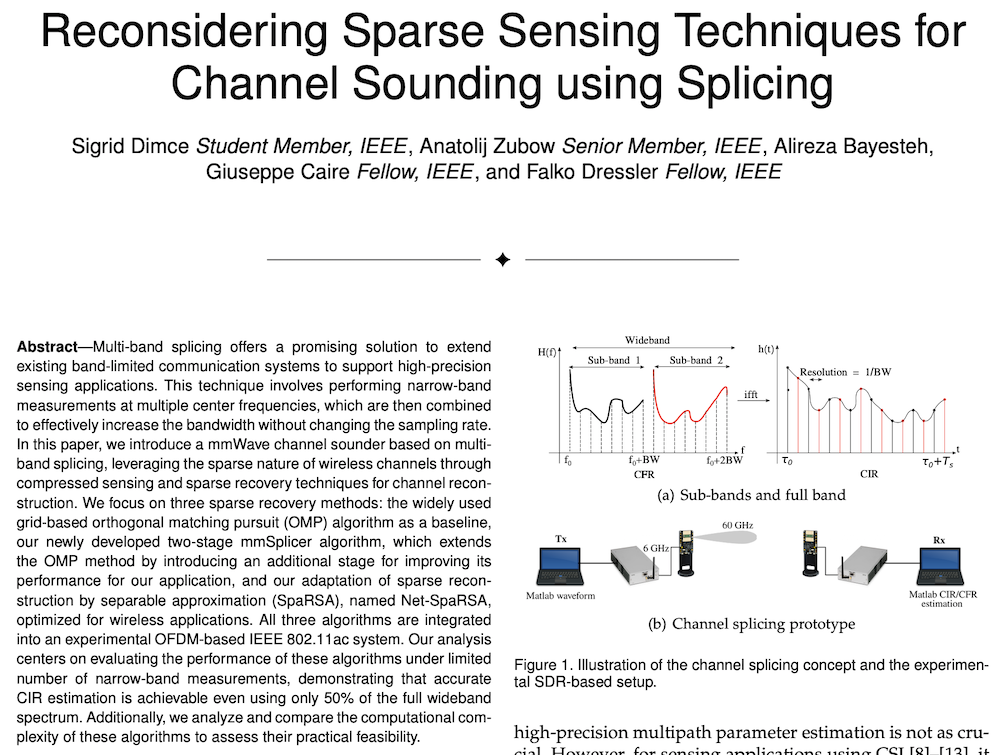
Our article Reconsidering Sparse Sensing Techniques for C... - June 15, 2025
New IEEE Transactions on Wireless Communications article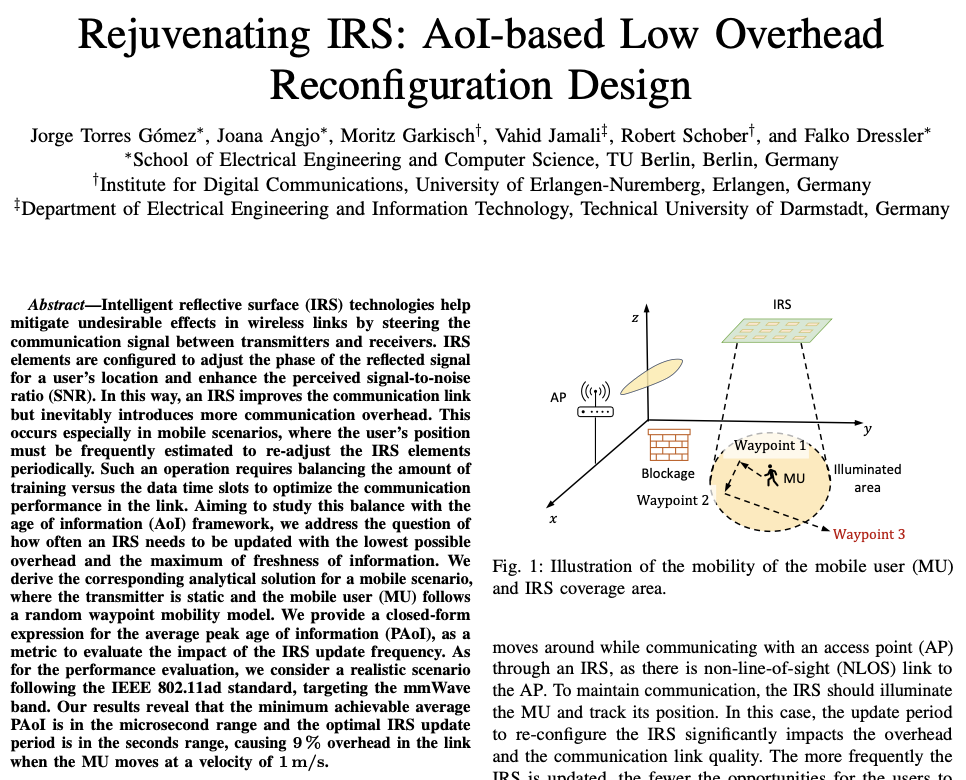
Our article Rejuvenating IRS: AoI-based Low Overhead Reco... - June 13, 2025
New IEEE Open Journal of Intelligent Transportation Systems article
Our article Incentive-based Platoon Formation: Optimizing... - June 11, 2025
Paper Presentation at IEEE ICC 2025
Osman Tugay Başaran presented our paper Next-Gen AI-on-RA... - June 10, 2025
New Elsevier Theoretical Computer Science article
Our article Robust Matroid Bandit Optimization: Near-Opti...

