Literature Database Entry
neurauter2022novel
Rene Neurauter and Johannes Gerstmayr, "A novel motion-reconstruction method for inertial sensors with constraints," Multibody System Dynamics, vol. 57 (2), pp. 181–209, December 2022.
Abstract
Motion reconstruction for rigid bodies and rigid-body frames using data from inertial measurement units (IMUs) is a challenging task. Position and orientation determination by means of IMUs is erroneous, as deterministic and stochastic errors accumulate over time. The former of which errors can be minimized by standard calibration approaches, however, sensor calibration with respect to a common reference coordinate system to correct misalignment, has not been fully addressed yet. The latter stochastic errors are mostly reduced using sensor fusion. In this paper, we present a novel motion-reconstruction method utilizing optimization to correct measured IMU data by means of correction polynomials to minimize the deviation of motion constraints. In addition, we perform gyrometer and accelerometer calibration with an industrial manipulator to address deterministic IMU errors, especially misalignment. To evaluate the performance of the novel methods, two types of experiments, one at constant orientation and another with simultaneous translation and rotation, were conducted utilizing the manipulator. The experiments were repeated for five individual IMUs successively. Application of the calibration and optimization methods yielded an average decrease of 95% in the maximum position error compared to the results of common motion reconstruction. Moreover, the average position error over the measurement duration decreased by nearly 90%. The proposed method is applicable to velocity, position, and orientation constraints for every experiment that starts and ends at standstill.
Quick access
Original Version ![]() (at publishers web site)
(at publishers web site)
BibTeX ![]()
Contact
Rene Neurauter
Johannes Gerstmayr
BibTeX reference
@article{neurauter2022novel,
author = {Neurauter, Rene and Gerstmayr, Johannes},
doi = {10.1007/s11044-022-09863-8},
title = {{A novel motion-reconstruction method for inertial sensors with constraints}},
pages = {181--209},
journal = {Multibody System Dynamics},
publisher = {Springer},
month = {12},
number = {2},
volume = {57},
year = {2022},
}
Copyright notice
Links to final or draft versions of papers are presented here to ensure timely dissemination of scholarly and technical work. Copyright and all rights therein are retained by authors or by other copyright holders. All persons copying this information are expected to adhere to the terms and constraints invoked by each author's copyright. In most cases, these works may not be reposted or distributed for commercial purposes without the explicit permission of the copyright holder.
The following applies to all papers listed above that have IEEE copyrights: Personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works for resale or redistribution to servers or lists, or to reuse any copyrighted component of this work in other works must be obtained from the IEEE.
The following applies to all papers listed above that are in submission to IEEE conference/workshop proceedings or journals: This work has been submitted to the IEEE for possible publication. Copyright may be transferred without notice, after which this version may no longer be accessible.
The following applies to all papers listed above that have ACM copyrights: ACM COPYRIGHT NOTICE. Permission to make digital or hard copies of part or all of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full citation on the first page. Copyrights for components of this work owned by others than ACM must be honored. Abstracting with credit is permitted. To copy otherwise, to republish, to post on servers, or to redistribute to lists, requires prior specific permission and/or a fee. Request permissions from Publications Dept., ACM, Inc., fax +1 (212) 869-0481, or permissions@acm.org.
The following applies to all SpringerLink papers listed above that have Springer Science+Business Media copyrights: The original publication is available at www.springerlink.com.
This page was automatically generated using BibDB and bib2web.
- Communicating Smartly in Molecular Communication Environments: Neural Networks in the Internet of Bio-Nano Things
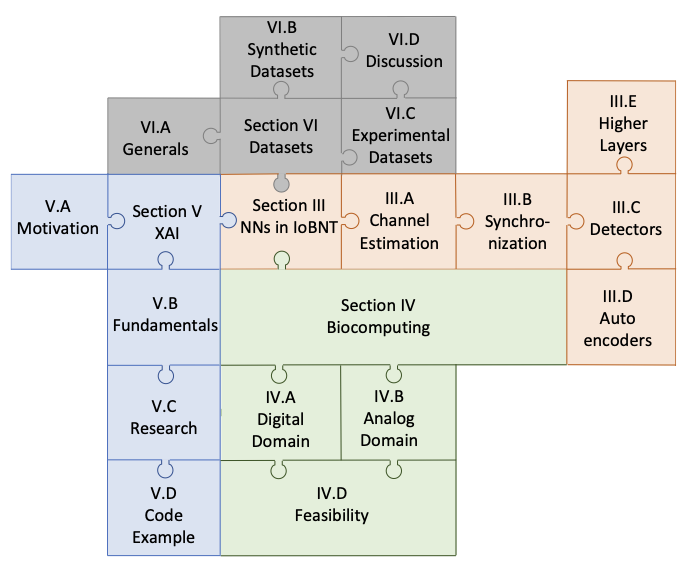
Recent developments in the Internet of Bio-Nano Things (IoBNT) are laying the foundation for innovative healthcare applications. Nanodevices designed to operate within...
- July 03, 2026
Keynote at IEEE GreenNet 2026
Falko Dressler gave a keynote titled 6G Edge Computing: I... - July 02, 2026
Best Poster Award at IEEE MAIN 2026
Elena Tonini received a Best Poster Award for our paper D... - June 29, 2026
Best Paper Award at WASA 2026
Our team member Youming Tao received a Best Paper Award f... - June 10, 2026
Paper Presentation at IEEE VNC 2026
TKN and former CCS members met at 17th IEEE Vehicular Net... - May 27, 2026
Paper Presentation at IEEE ICC 2026
Our team member Lisa Y. Debus presented our paper titled ...

