Research Vision

Our research objectives include adaptive wireless networking (sub-6GHz, mmWave, visible light, molecular communication) and wireless-based sensing with applications in ad hoc and sensor networks, the Internet of Things, and Cyber-Physical Systems. Our current projects focus on novel and innovative concepts for 5G/6G communication systems, digital smart cities of tomorrow, and vehicular applications, emphasizing on communication technologies and cooperative assistance systems.
Research Focus
Next Generation Wireless Communicartions
Going towards 6G / NextG as well as WiFi7, we study topics like channel prediction, joint communication and sensing (JCAS), the use of intelligent reflective surfaces (IRS), and coexistence and collaboration in unlicensed spectrum bands. We are particularly interested in new radio resource and interference management. Cross-technology communication (CTC) is a means to bridge the gap between devices and standards; this, e.g., enables control channels to support IoT devices using narrow-band communication from wide-band OFDMA-based systems. Going beyond standard sub-6GHz channels, we are working on line of sight communication technologies such as millimeter wave (mmWave) and visible light communication (VLC). Research challenges include the characterization of channels based on empirical measurements to develop realistic simulation models, as well as the design of heterogeneous communication protocols using VLC and/or mmWave in combination with sub-6GHz. We are also investigating joint communication and sensing using both mmWave and VLC for ranging and presence detection.
Beyond RF / Unconventional Communication
Going well beyond conventional communication, we explore nano communication and molecular communication channels; helping nodes on a nano or micro scale and operating in challenging environments such as liquids or (explosive) gases need to rely on different communication paradigms and technologies. Examples range from communicating nanobots patrolling through the human body for medical purposes to air-based molecular communication, and to macroscopic scale communication in industrial facilities and pipe networks containing water, oil, or gases. Such nano communication channels are considered to be based on traveling molecules, which can be composed of magnetizable elements, biochemical molecules, and other markers that can be detected using biological, chemical, or physical processes. Nano communication, often referred to also as molecular communication, has the potential to complement classic radio-based telecommunication networks and, eventually, become an integral part of 6G+ solutions. We explore various types molecular communication principles have been explored using analytical methods, simulation techniques, as well as lab experiments.
Intelligent Edge Computing and Mobile Systems
The field of vehicular networking (V2X) and intelligent transportation systems has been on our research agenda since a long time. Platooning, i.e., cooperative automated driving of vehicle convoys, needs to be supported by adaptive heterogeneous communications and optimal platoon formation algorithms. More recently, we are interested in safety systems for vulnerable road users – focusing on bicyclists and pedestrians. Here, human-in-the-loop testing in our virtual cycling environment can be the key for next generation safety solution. Vehicular micro clouds help to support MEC in 5G networks and beyond. These micro clouds are made of cars dynamically joining and leaving the cluster. Offloading can now be performed in a fully distributed way, still supported by the cloud and data centers. Following this line of thought, we study next generation virtualized edge computing concepts that will be an integral part of 6G networks.
Machine Learning and Networking
Wireless communication networks have evolved into complex and dynamic systems. The numbers of knobs to be optimized are huge, e.g., in WiFi and 3GPP standards. Thus, unconventional approaches needed to master the complexity of control and management. We explore machine Learning algorithms like reinforcement learning (RL), which are very well suited for such applications. RL is particularly promising for hard problems like co-existence of heterogeneous technologies. Still, challenges like long learning time need to be solved. In a further step, we study transfer learning for training in simulation and use of the trained models in real world. We developed multiple Open AI Gym-based toolkits, e.g., ns3gym (network simulation), grGym (software defined radio), and VeinsGym (intelligent transportation systems).
Research Methodology
Modeling, simulation, and experimentation
Our research methodology is covering the full range from modeling to simulation to real-world experimentation. To support the research community, we make almost all developed software and measurement data available as Open Source and Open Data, respectively. In the domain of simulation-based performance evaluation, we are particularly proud of our widely used frameworks. This includes Veins, Plexe, and VeinsGym for vehicular networking, EVI for Real-time coupling with ego cars, VCE for integrating vulnerable road users, and Pogona for simulating molecular communication. As a systems-focused research group, we build systems - at least prototypes - for real-world experiments and field tests. We make use of COTS platform-based systems using standard chipsets for WiFi5 and WiFi6 experiments; we developed OpenC2X, an embedded Linux based platform for standard-conform field tests; and we provide libraries for GNU Radio-based software defined radio such as gr-ieee802-11 and gr-ieee802-15-4.
- Decentralized Model Predictive Control for Platooning: Enhancing Human-Driver Collaboration
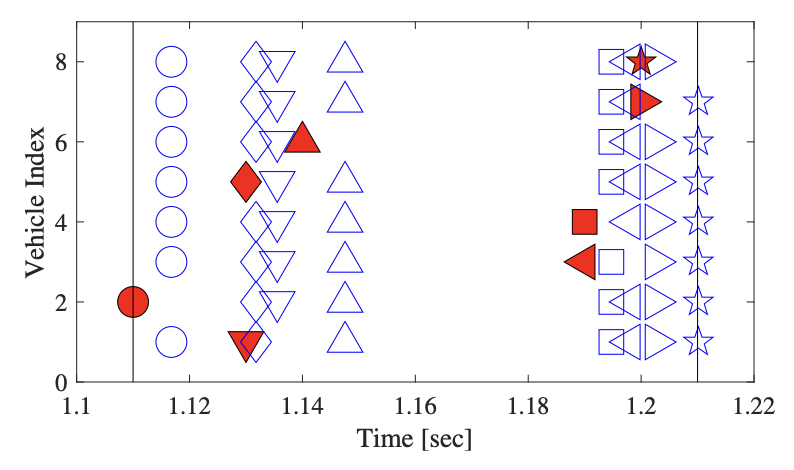
Recent advances in cooperative adaptive cruise control have demonstrated the potential for vehicle platooning to revolutionize road transportation through enhanced saf...
- July 19, 2026
New IEEE Internet of Things Journal article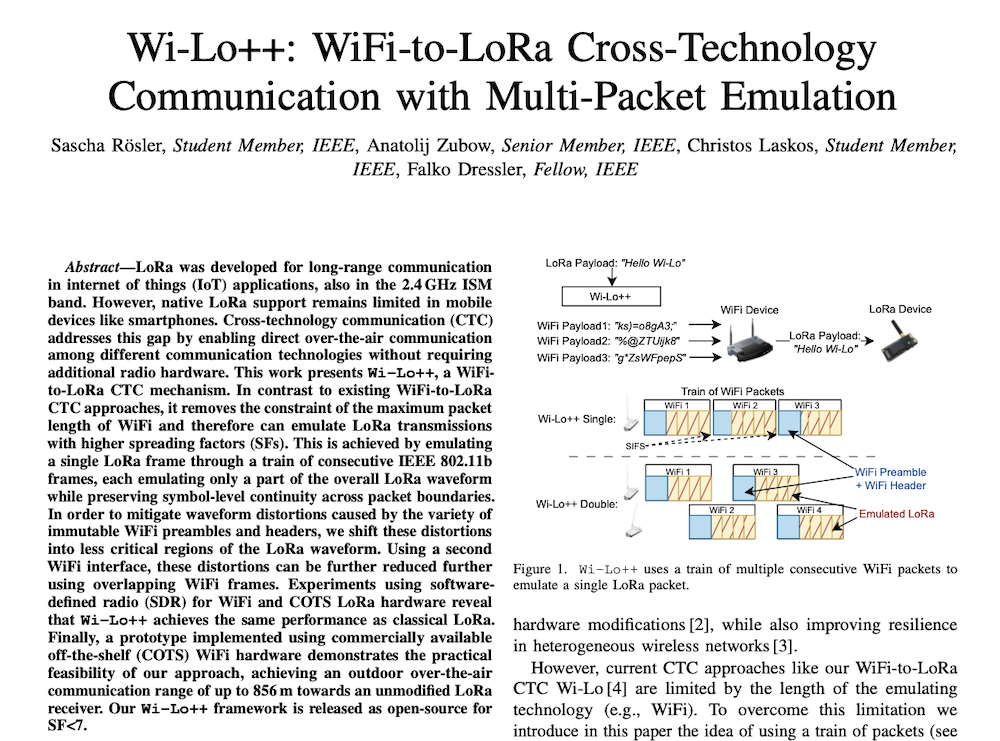
Our article Wi-Lo++: WiFi-to-LoRa Cross-Technology Commun... - July 03, 2026
Keynote at IEEE GreenNet 2026
Falko Dressler gave a keynote titled 6G Edge Computing: I... - July 02, 2026
Best Poster Award at IEEE MAIN 2026
Elena Tonini received a Best Poster Award for our paper D... - June 29, 2026
Best Paper Award at WASA 2026
Our team member Youming Tao received a Best Paper Award f... - June 10, 2026
Paper Presentation at IEEE VNC 2026
TKN and former CCS members met at 17th IEEE Vehicular Net...

