AgriculturalV2V

Team @ CCS
Funding
- Agricultural Industry Electronics Foundation (AEF)
Project Time
- 01/2018 - 05/2018
Description
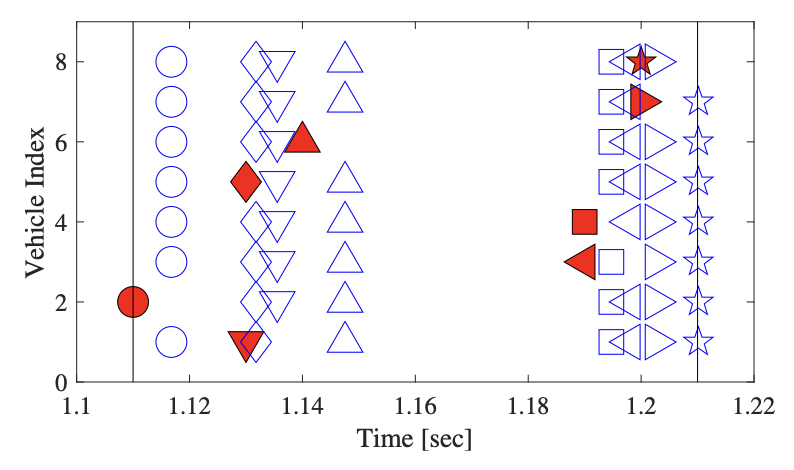
Recent trends towards autonomous driving are complemented by vehicular networking solutions, leading to what we now call cooperative autonomous driving systems. This trend is quite visible to the public in the automotive domain; however, only few know about the massive technological progress in the agricultural world. Here, autonomous driving, i.e., automated harvesting, etc, is already standard and early approaches to cooperative maneuvers have been brought to market already. Within this project we want to study how the solutions known from vehicular networking can be applied to agricultural machines in order to allow cooperative driving maneuvers for an increased efficiency.
Selected Publications
2018
Conferences and Workshops
 Florian Klingler, Johannes Blobel and Falko Dressler, "Agriculture meets IEEE 802.11p: A Feasibility Study," Proceedings of 15th IEEE International Symposium on Wireless Communication Systems (ISWCS 2018), Lisbon, Portugal, August 2018.
[DOI, BibTeX, PDF, More details]
Florian Klingler, Johannes Blobel and Falko Dressler, "Agriculture meets IEEE 802.11p: A Feasibility Study," Proceedings of 15th IEEE International Symposium on Wireless Communication Systems (ISWCS 2018), Lisbon, Portugal, August 2018.
[DOI, BibTeX, PDF, More details]
Featured Paper:


- Decentralized Model Predictive Control for Platooning: Enhancing Human-Driver Collaboration
Recent advances in cooperative adaptive cruise control have demonstrated the potential for vehicle platooning to revolutionize road transportation through enhanced saf...
- July 31, 2026
New IEEE Transactions on Mobile Computing article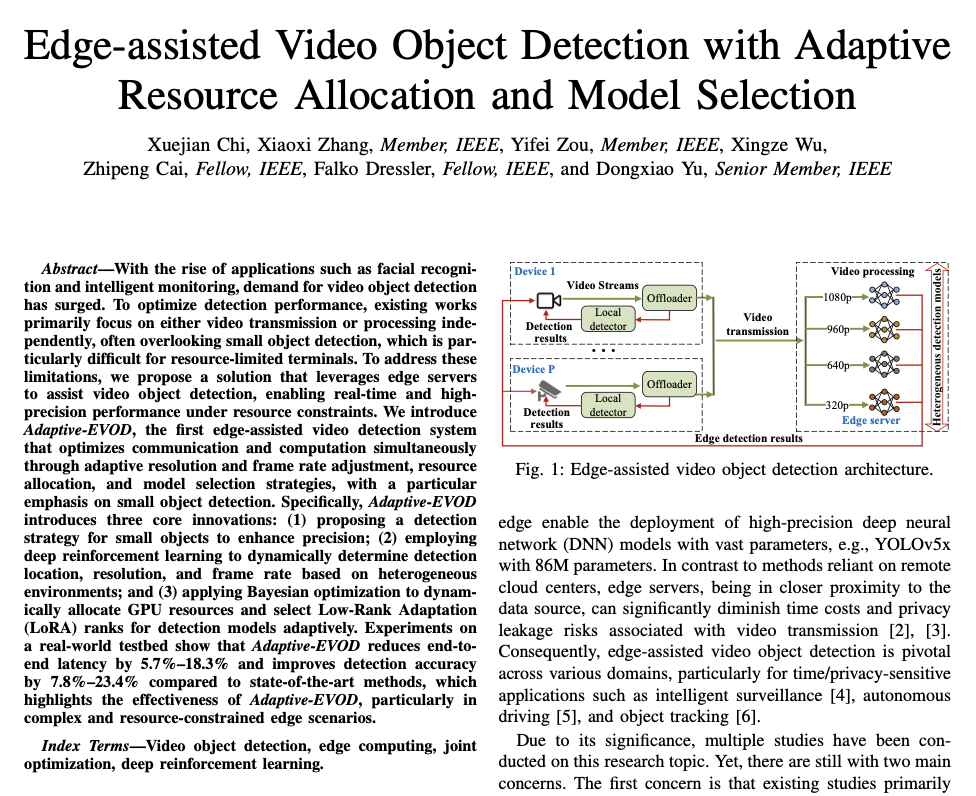
Our article Edge-assisted Video Object Detection with Ada... - July 30, 2026
Interdisciplinary Workshop on Precision Medicine in the Era of the Internet of Bio-Nano Things
On July 30 - 31, 2026, our TKNano group together with the... - July 27, 2026
New DFG project ML4WIFI2
Our proposal Machine Learning-based Wi-Fi Optimization 2 ... - July 19, 2026
New IEEE Internet of Things Journal article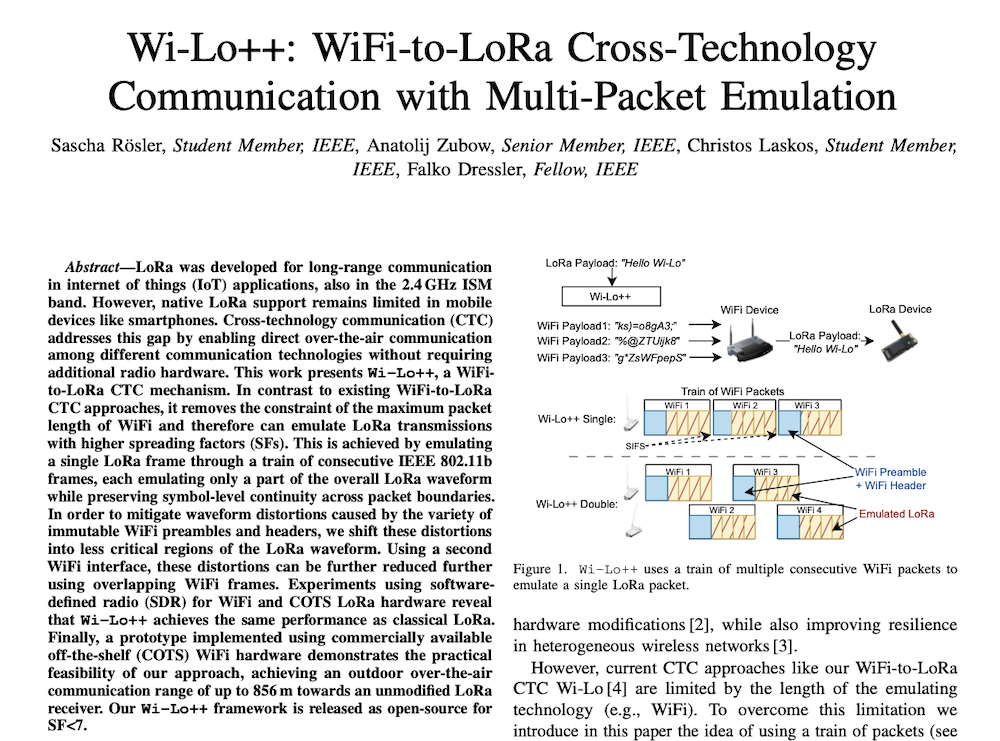
Our article Wi-Lo++: WiFi-to-LoRa Cross-Technology Commun... - July 03, 2026
Tutorial at IEEE NetSoft 2026
Our member Doğanalp Ergenç presented a tutorial lecture o...